




产品介绍
一、履带吊安全监控系统软件总体结构设计
考虑到系统功能、操作主体的不同以及系统安全性,本文所没计的监控系统软件功能具 有两种工作模式:管理员模式和工作模式。管理 员模式主要用于预设系统参数,包括:履带吊静态信息(血口几何尺寸、较大静载荷、主副钩重等) 设置模块、传感器标定模块等,管理员模式下的操作对系统的正常运转有巨大的影响:工作模式是系统在管理员设置的各类参数下正常工作的模式,主要包括:实时数据采集模块、实时数 据处理模块、运算控制模块、实时输出模块等等。
二、程序的设计
—般来讲,监控程序的任务有:完成系统自检、初始化、处理键盘6分令、处理接口命令、处理 条件触发并调度执行模块及完成显示等功能。 但习惯上监控程序是指键盘解析程序,而其他 任务赐分散在某些特定功能模块中。本文所设 计的监控程序就是如此。数字量采集本系统对风速传感器输入脉冲频率的计数采用外部计数、内部定时的方法,即利用单片机内部计数器对输入脉冲进行计数。用单片机内部的定时器 定时,计算脉冲频率。监控程序的基本节构主要分为两部分:初 始化部分,由上电复位后的主程序执行,用来初 始化系统的硬件资源和软件资源;监控循环实 体,是监控程序的实质部分,完成键盘扫描、键码解释、执行功能、模块刷新和显示等任务,一 般将其放在主程序初始化部分之后。监控程序 兼有作业顺序调度型和键码分析作业调度型的 特点。系统按照预先既莒帮秘断书幽&查询计 算、判断、控制等工作;通过键盘可以执行设置、 调整撙p肖、显示、通讯、指示锄能
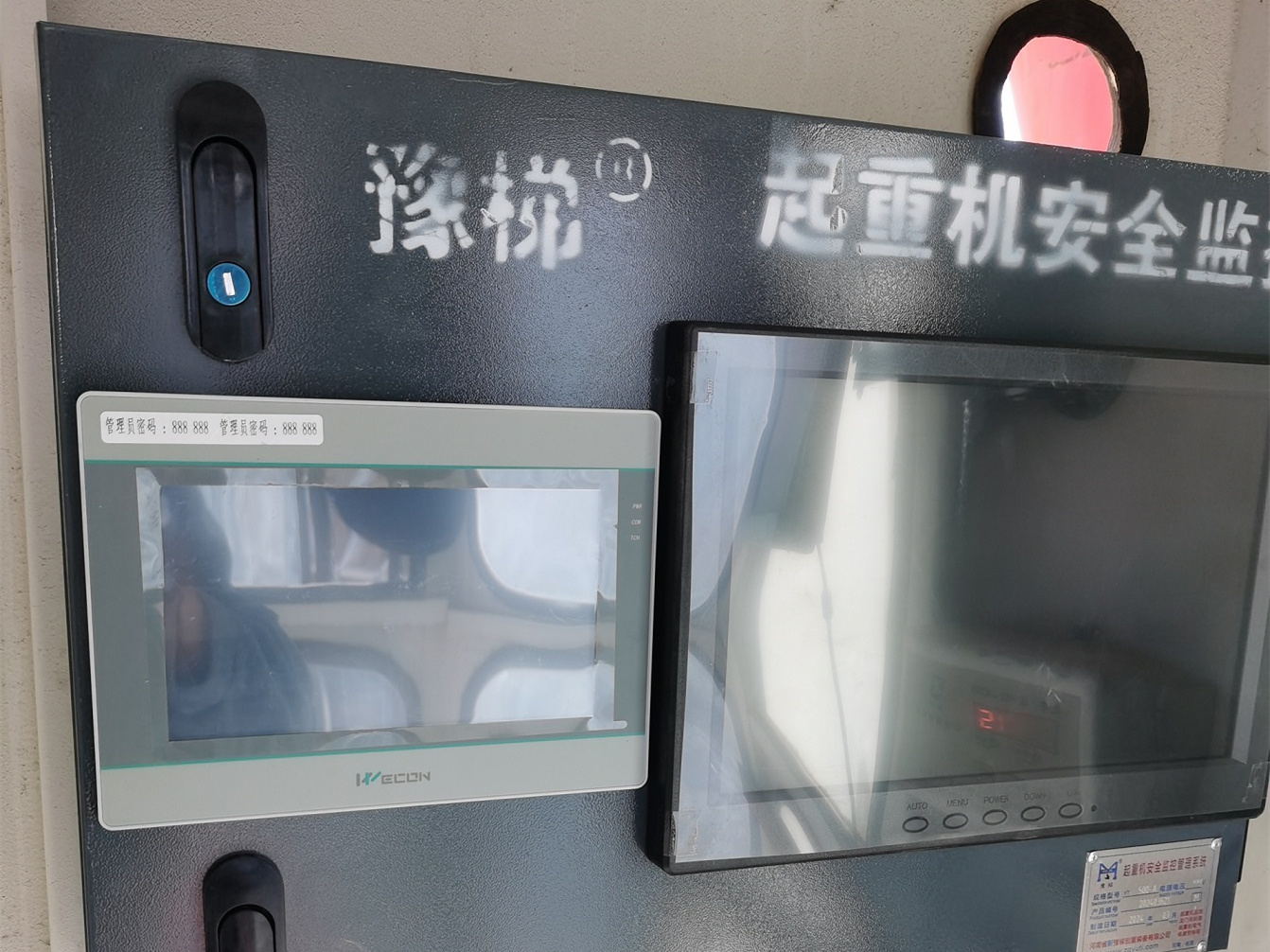
三、履带式起重机监控系统系统监控主要软件功能的实现
面扳显示。面板显示部分关自剖星彀字的显 示,而显示的前提是要提取点阵汉字字模,做成 系统自己的汉字库头文件,并按照LCD显示的 顺序存贮。—个16x16点阵的汉字需要32个字 节存贮其字模。 数据处理。系统数据处理程序主要涉及郅 超重机角度、力矩、吊钩没计等测量计算。角度 限制和力矩限制角度限制和力矩限制是该起重 机安全监控系统所要求的基本功能。仰角限制 的基本要求是当仰兔超过所规定的上、下, 声、光报警,并输出控制信号。
冶金起重机安全监控系统设备供货商专注架桥机监控系统设备研究和生产。本公司架桥机安全监控系统设备价格实惠欢迎采购。
